
欧洲公路安全保险协会发布的《前照灯测试和评级协议》规定了一个测试场景,专门用于评估和测试汽车前照灯系统提供的道路照明情况。
在测试期间,被测车辆(VUT)应沿着五条不同的轨道行驶:250米直道,150米半径左右弯道,长度为120米,径向250米,左右弯道长度为120米。
位于轨道末端的照度计测量进近过程中前大灯的光发射。VUT由驾驶机器人自主操纵,以确保测试的可重复性。
整个前照灯测试和评级协议可在IIHS网站上找到:
https://www.iihs.org/ratings/about-our-tests/test-protocols-and-technical-information
测试挑战
在测试期间会出现以下挑战:
IMU数据采集,以确定绝对位置和精确的车速,并在 汽车沿着预定义的路线行驶时测量相对的剩余轨道距离
CAN数据采集,用于在测试期间采集车辆数据
分布式和时间同步数据采集车辆CAN数据和IMU数据在移动VUT和模拟照度计数据定位在轨道末端
确定VUT的横向轨道偏移以及汽车行驶时到终点的相对剩余距离,以证明测试程序的可重复性
DEWETRON的解决方案
硬件
1 个 DEWE3-M4 (图 1):
安装在移动的 VUT 中,用于通过 CAN 采集车辆 数据和通过以太网采集 IMU 传感器数据。
图1:DEWE3-M4外观
该系统包括以下模块:
1个TRION-CAN模块(图2):用于CAN数据的数据采集模块

图2:TRION-CAN模块
1 个 TRION-TIMING同步模块(图 3):TIMING模块,用于接收GPS信号,实现系统的绝对时间同步。

图3: TRION-TIMING同步模块
1 个 DEWE3-A4 (图 4):
固定于不同轨道的末端,用于采集照度计等传感器数据。
图4: DEWE3-A4
该系统包含以下模块:
1 个 TRION-1603-LV 模块 (图 5):

图5: TRION-1603-LV 模块
6通道隔离数据采集模块,用于高达±100V的低压信号;模块数量取决于照度计的数量。
1 个 TRION 定时模块 (图 6):
Timing模块,用于接收GPS信号,实现系统的绝对时间同步。

图6: TRION 定时模块
软件
OXYGEN 数据采集软件同时运行在每一个DEWETRON系统上。
该软件包括:
OXYGEN-NET:
用于所有DEWETRON设备的联网和同步数据采集。支持任意一台设备通过网络对其余所有设备进行远程控制、通道设置等;各设备采集数据可以通过以太网(WiFi)实时传输到控制系统,并备份存储
IMU plugin:
扩展功能,DEWETRON设备可以通过以太网直接获取IMU传感器数据;一个DEWETRON 系统可对多达六个 IMU数据流进行时间同步和同步的数据采集;避免通过CAN接收IMU数据时出现的时序不确定性
支持的IMU:GeneSys ADMAs和OxTS RT;
Automotive plugin:
在软件中生成测试环境中涉及的所有移动和静止对象,并测试过程中实时的在地图上可视化的显示,在线实时计算它们之间的相对距离;对于固定端的DEWETRON系统而言,这是必需的功能
前照灯评估所需的其他第三方硬件:
IMU传感器 。用于确定VUT的绝对位置和精确速度(例如Genesys ADMA-G-PRO+或者OxTS RT)
驾驶机器人 。用于自主转向汽车,以确保测试的可重复性(例如Stähle SAP2000或者ABD)
照度计。用于确定汽车接近赛道尽头时的灯光亮度范围(例如Konica Minolta T-10A)
完整的测试设置(图7)

OXYGEN软件的优势
NETWORKED MEASUREMENTS
OXYGEN-Net功能使测试工程师能够通过以太网设置一个大型的本地分布式数据采集系统。所有分系统都可以通过主系统进行远程控制和配置。所有分系统都可以通过主系统远程启动并同步进行。所有分系统的数据都可以通过以太网在线实时传输到主系统,并同步存储到一个数据文件中。支持备份数据存储,以便在发生网络错误时进行备份。
通过GPS将所有系统时间同步并通过WiFi网络将所有测量数据实时传输到主系统。这使DEWETRON系统成为ADAS测试的专用解决方案。由于数据通过GPS在线同步,因此手动且耗时的数据后同步将成为过去式。唯一的需要注意的是WiFi网络的带宽和覆盖范围。
THE SHAPE EDITOR(图 8):
使用图形编辑器,可在软件中创建虚拟车辆、行人或障碍物等,只需单击几下即可。这个虚拟车辆,行人或障碍物可以保存为一个文件,还可以在这些虚拟图形上设置多个关注的测试点(POI),如重心,汽车的几何中心或前大灯的精确位置等。使用OXYGEN Automotive插件可实时计算与其他车辆,行人(VRU),车道和预定义轨道的距离。

图 8:OXYGEN Shape Editor
计算测试对象之间的相对距离 (图9):
在前照灯评估测试期间,创建的虚拟车辆可以使测试工程师能够精确地确定:
VUT的横向轨道偏移
VUT到赛道尽头的剩余行驶距离
VUT和轨道末端之间的最小偏差
距离的计算可以直接引用在虚拟图形中创建的任何测试点(POI)。例如:VUT 的横向轨道偏移可以参照 VUT 的几何中心和VUT的前保险杠中心来确定。而照射最小距离则可以通过左前灯或右前灯位置计算。由于距离是在线计算的,并且时间与照度计数据同步。因此可以在测试期间,实时生成车辆前照灯系统的总体评估。在完成特定测试条件和测量位置(例如,行车道右边缘)的三次有效测试后,将三次测试的能见度距离取平均值。使用这些平均值,分别计算能见度和照明缺陷,然后求和以确定前照灯系统的总体额定值。
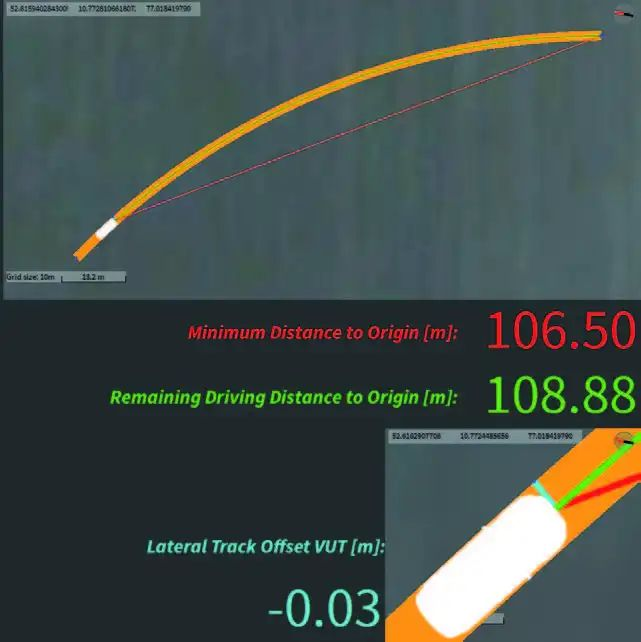
图 9:相对距离的计算
试验场的可视化 (图 10):
试验中所有的测试设置和测试对象都可以在软件中的卫星图像或OpenStreetMap®上可视化。为了更好的查看和解释数据,所有的试验场地和道路卫星云图都可在线更新,无论是在测试设置期间,还是在之后的数据分析和后处理期间,以提供准确的可视化信息。

图 10:试验场可视化
更多的功能
DEWETRON除了可以为您提供完整的解决方案外,用户还能通过该设备完成其他汽车法规试验。在测试过程中,DEWETRON系统几乎可以采集任何传感器数据。DEWETRON提供广泛的信号调理和A/D转换模块,这些模块可以安装到DEWE3-A/M4或任何其他DEWE3机箱中。
无论是通过以太网传输的模拟或数字传感器数据、CAN 数据或 UDP 传感器数据,所有数据流都可以与 DEWETRON系统同步采集,并存储到同一个数据文件中,以确保单点性真理。支持各种不同的外部同步信号:IRIG、PPS、GPS 或 PTP (IEEE 1588)。
OXYGEN提供了一个强大的数学模块来执行在线信号处理。只需单击几下即可添加数学运算、统计计算、 信号滤波和频谱信号分析,并在线更新。
此外,数据可以导出为不同的文件格式,以提供第三方软件包的接口,用于专用和自动化的用户定义数据后处理。
 沪公网安备 31010702002647号
沪公网安备 31010702002647号